Since GPS was launched in the late 1970s, society has become increasingly dependent on global navigation systems. While consumer applications like smartphone navigation don't require high accuracy, industrial sectors, including land surveying, precision agriculture, drone control, and autonomous vehicles, demand significantly better positioning precision.
Standard Single Receiver Positioning
GNSS networks comprise over 80 orbiting satellites from multiple systems (GPS, GLONASS, Galileo, BeiDou). Each satellite transmits timing data, orbital information, and identification codes. Ground receivers calculate distance to satellites using signal propagation speed, then use trilateration with at least four visible satellites to determine position.
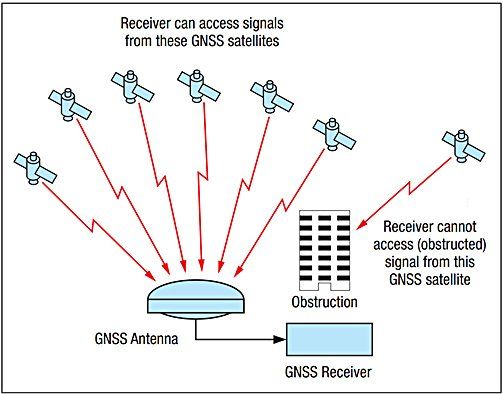
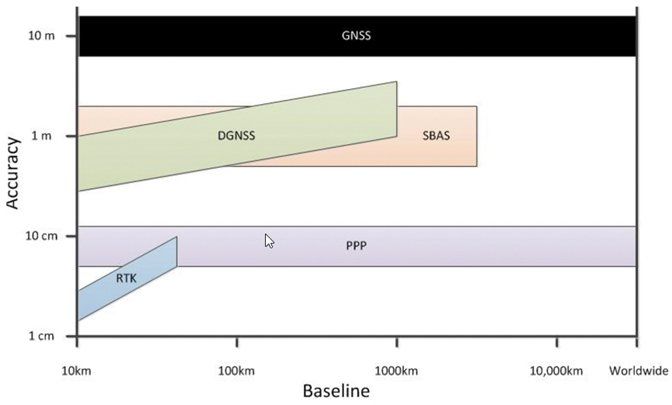
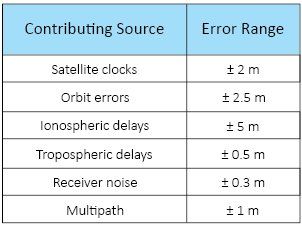
However, single-receiver positioning produces errors of 1 to 10 meters, primarily from satellite clock drift, orbital inaccuracies, and atmospheric interference from the ionosphere and troposphere.
Differential GNSS (DGNSS)
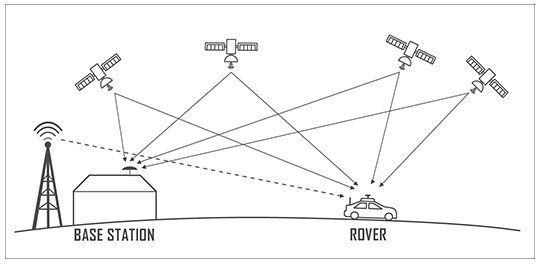
DGNSS uses a reference station at a known location that identifies positional errors and transmits corrections to mobile "rover" units via radio links. This improves accuracy to approximately 1 to 2 meters.
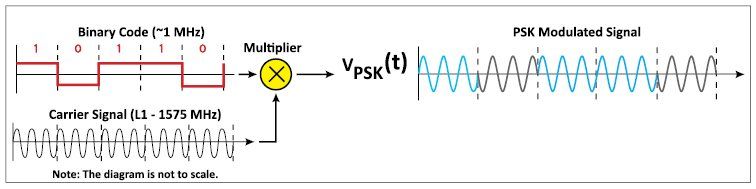
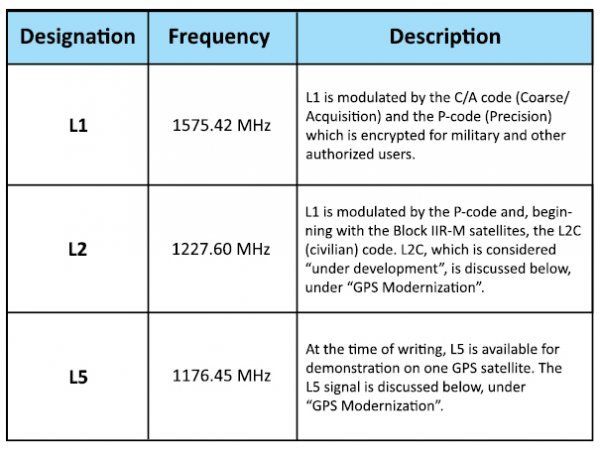
Real-Time Kinematic (RTK) further enhances this by utilizing carrier phase frequencies (1575 MHz) instead of binary code, achieving 1 to 2 centimeter accuracy. However, RTK systems require expensive local infrastructure costing tens of thousands of dollars and operate within 20 to 30 kilometer baselines due to varying atmospheric effects.
Satellite Based Augmented System (SBAS)
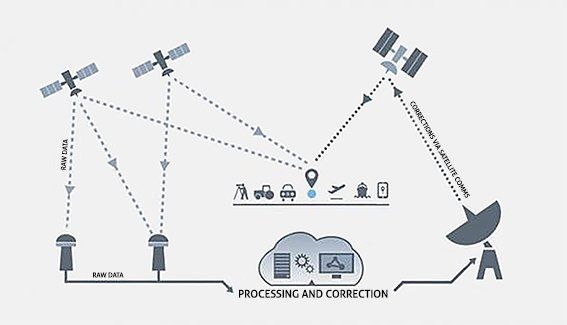
SBAS networks employ multiple reference stations across operational regions to map atmospheric effects. Correction data, covering atmospheric conditions, orbital errors, and clock corrections, transmits via geostationary satellites on existing GPS L1 channels, compatible with most current receivers.
Standard SBAS provides 1 to 2 meter accuracy. Dual Frequency Multi Constellation (DFMC) SBAS, tested in New Zealand and Australia, combines L1 and L5 channels for sub-meter accuracy, though "off-the-shelf" hardware remains limited.
Precise Point Positioning (PPP)
PPP achieves RTK-comparable accuracy using single receivers by leveraging extremely precise global satellite correction data. Dual-frequency PPP exploits the relationship between signal frequency and ionospheric delay, almost entirely eliminating ionospheric errors.
PPP offers global operational range, its strongest baseline-to-accuracy ratio. Its primary drawback is convergence time, requiring 20 minutes to several hours for accurate initial positioning.
Conclusion
Combined SBAS and PPP technologies promise approximately 5 centimeters accuracy for dual-frequency receivers and sub-meter accuracy for affordable single-frequency units. Unlike RTK systems, infrastructure costs shift from users to government agencies, democratizing precision positioning across industries including UAVs, autonomous vehicles, precision agriculture, and surveying. These trials, ending early 2019, represent transformative potential for positioning technology.